Duplo
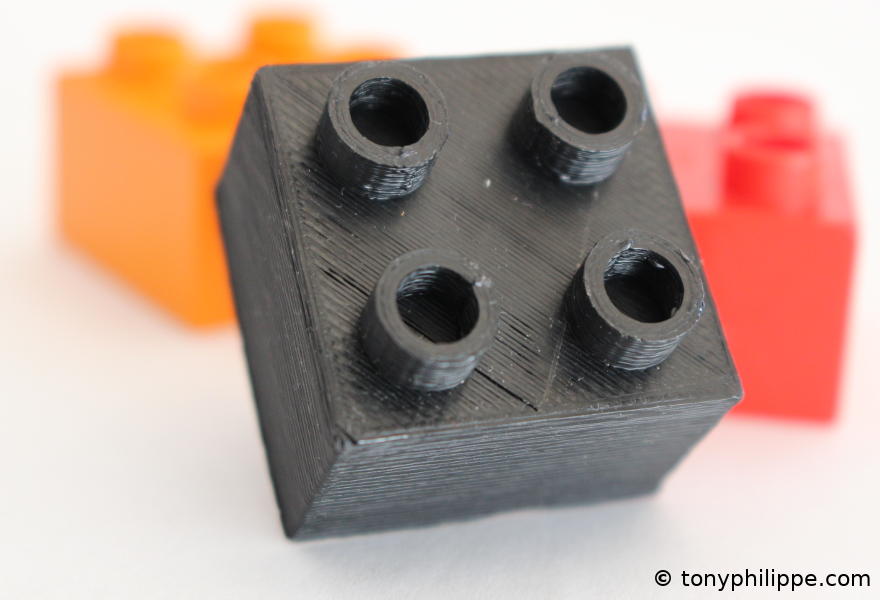
I designed a copy of the Lego duplo thanks to the great FreeCAD software. I printed it with layers of 0.1mm to have a good accuracy. This part fits really well to the official parts !
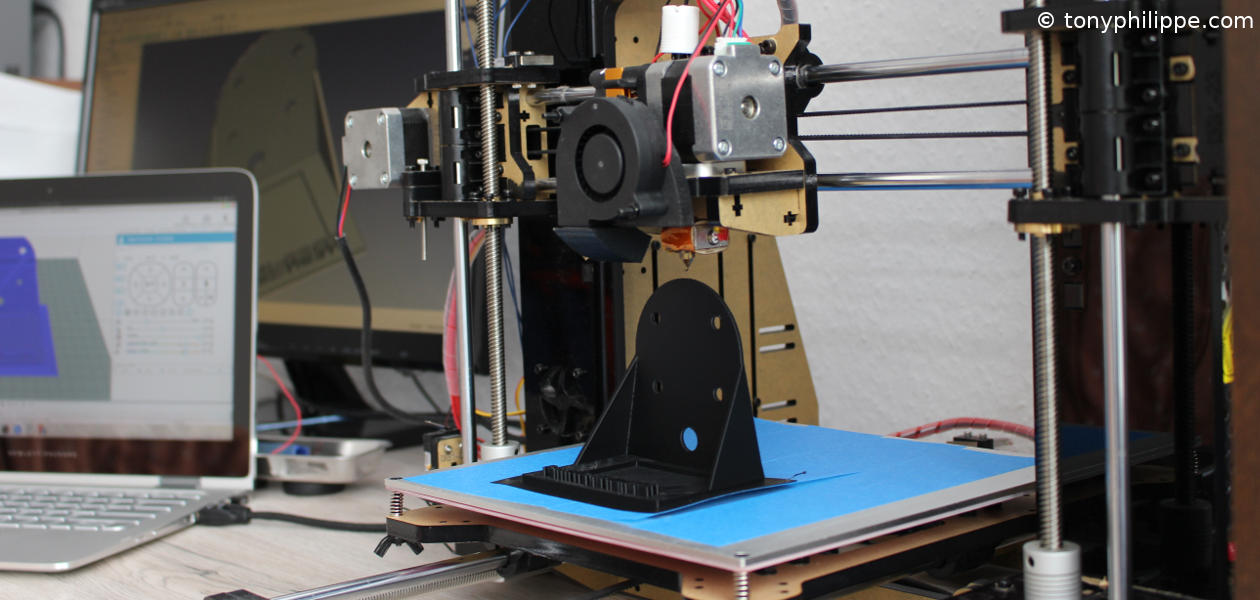
I am having fun by designing 3D models and printing them in different materials such as PLA, ABS and Wood-PLA. I assembled the Do It Yourself Kit "Geeetech Prusa I3 X". Below some examples of my prints.
I designed a copy of the Lego duplo thanks to the great FreeCAD software. I printed it with layers of 0.1mm to have a good accuracy. This part fits really well to the official parts !
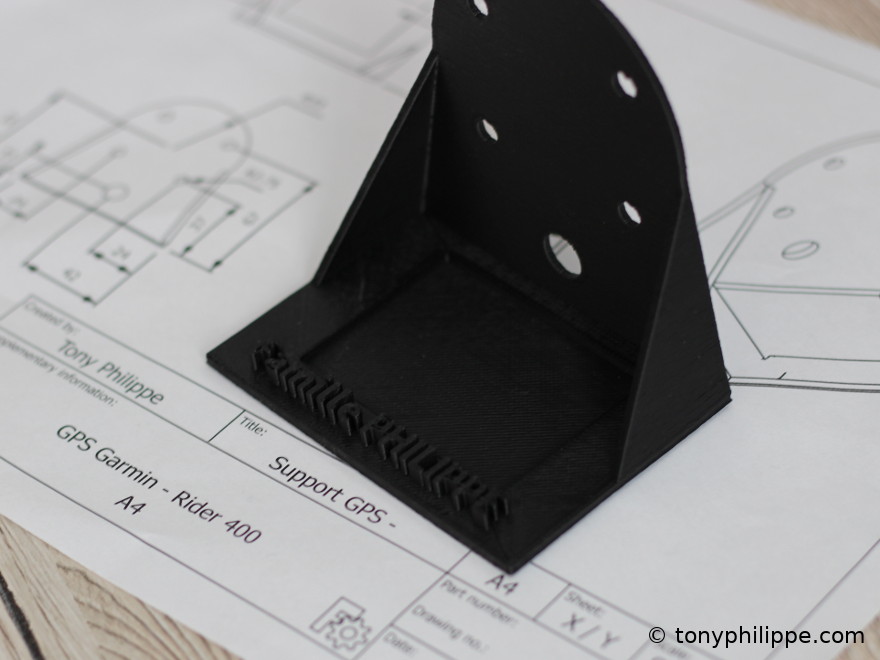
I wanted to use my motorbike's GPS in my car but I could not find an appropriate support. I designed it with freeCAD and printed it in ABS material.
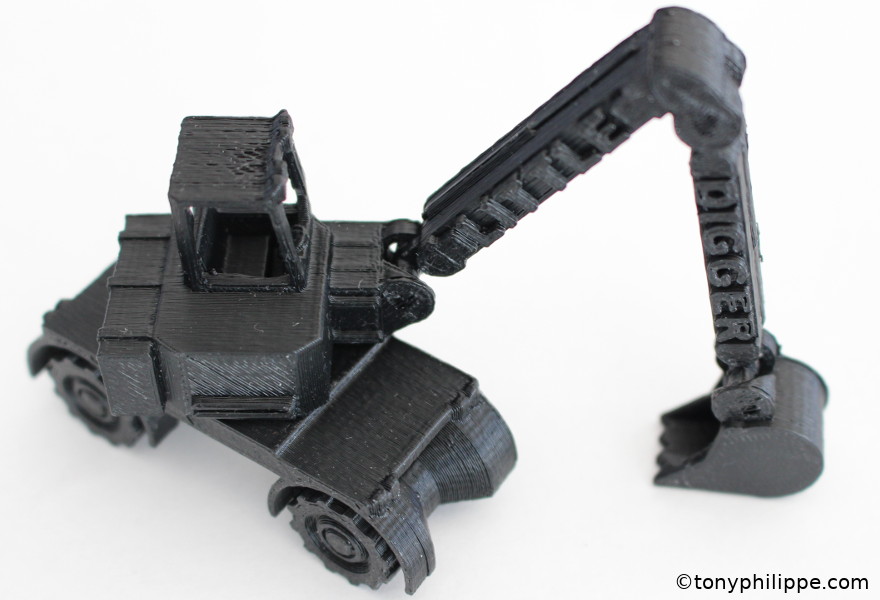
The web offers many 3D Models to download. I printed some of them for my children. For example this little digger with an amazing design: parts are rotating against each other thanks to some small gaps, although it was a single step print. I had to add an extra fan cooling system to avoid that the edges of the print were bending (warping problem).
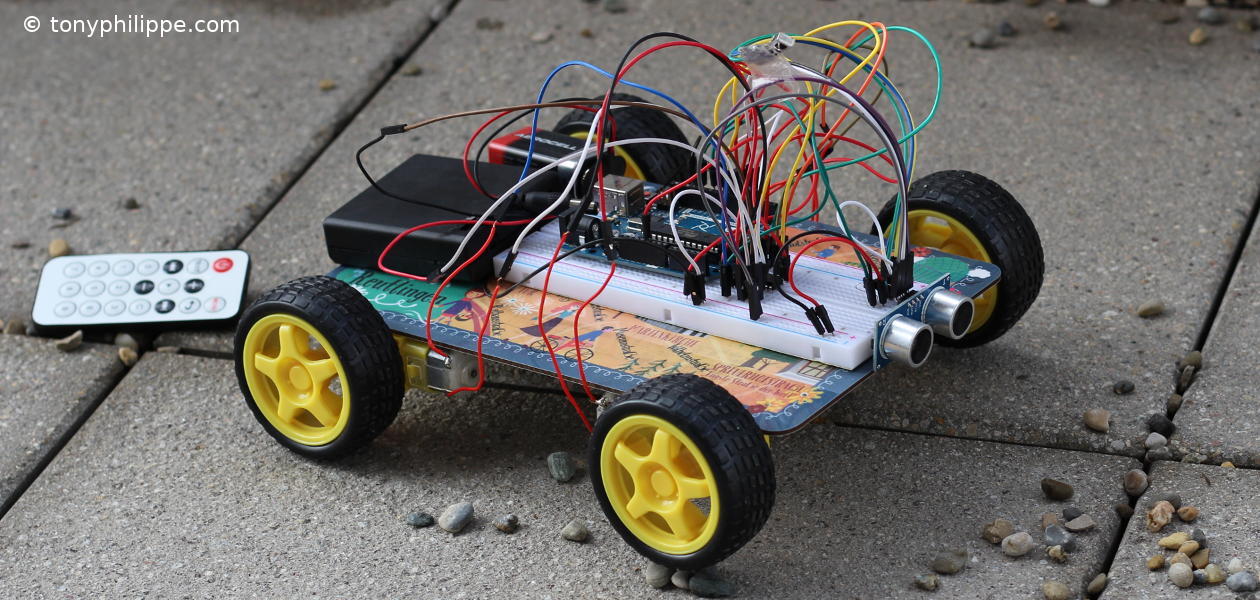
I created a RC car based on an Arduino Board. I used 4 motors triggered by a L293D chip. The car is controlled with a Infrared Remote. The speed is variable thanks to the PWM outputs. Afterwards, I decided to upgrate this car to become a small robot...